2.2. 多雷达数据采集(使用览沃枢纽 Livox Hub)
2.2.1. 连接及配置
以一台Livox Mid-40和一台Livox Horizon为例:
软件部分:ubuntu 16.04、ROS、Livox-SDK、Livox ROS driver(此部分驱动的下载和安装详细过程见 驱动)
硬件部分:Livox Mid-40 × 1、Livox Horizon × 1、Livox Hub × 1、千兆网线 × 1、Livox Hub电源线 × 1、Livox雷达电池 × 1、PC × 1。
时间戳同步:关于多部livox LiDAR之间的时间戳同步,可参考: Livox设备时间同步
连线和IP配置:Livox Hub通过以太网进行数据通信,采用UDP通信协议,支持两种IP地址配置:静态IP地址和动态IP地址,出厂时默认采用动态主机配置协议(DHCP)分配IP地址。根据IP地址设置形式不同,其物理连接方式也稍有差别。
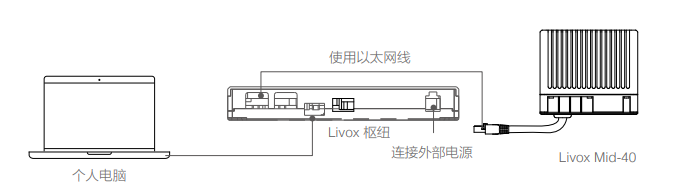
采用静态IP地址进行连接时,其物理连接如下图所示:
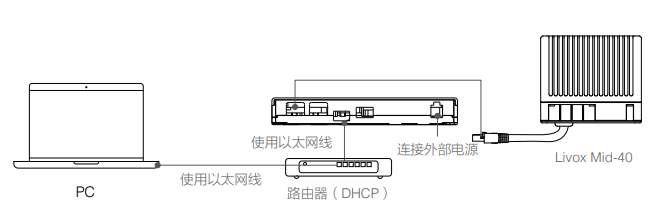
采用动态IP地址进行连接时,其物理连接如下图所示:
Livox Hub出厂时默认采用动态主机配置协议(DHCP)分配IP地址,若希望使用静态IP进行连接,需连接路由器进行设置,步骤如下:
1.按照上图动态IP地址连接方式,通过路由器连接Livox Hub、Livox Lidar、PC和电源。
2.在电脑上运行Livox Viewer,点击打开设备管理器。选择Livox Hub,点击打开设备属性页面。在设备属性页面中将Livox Hub的IP地址设置为静态IP地址。注意Livox Hub的静态IP地址应设置为192.168.1.X(其中,X为2~233之间的任意数字)。
3.设置完毕后,断开Livox Hub的所有连接。
4.若Livox Hub为静态IP模式,则电脑也应设置为静态IP模式(若电脑采用动态IP模式,可能导致无法读取到Livox Hub)。电脑的静态IP地址应设置为192.168.1.X(其中,X为2~233之间的任意数字),并且不可与连接的Livox Hub的IP地址相同。
若对Hub的连线及IP配置存在疑问,可参考Livox官网“Livox Hub用户手册 v1.2”的“连接”部分,下载地址如下 Livox Hub用户手册v1.2
本示例使用静态IP配置,如下图所示: .. image:: ../../image/static_IP_config.rst
Livox Hub上最多可同时接入9个Livox Lidar,本示例连接了一台Livox Horizon和一台Livox Mid-40,若希望进行更多台Lidar同时采集,可直接进行连接。
2.2.2. 使用ROS进行数据采集
连接成功后,在本地的ws_livox路径下编译:
catkin_make
更新当前ROS包环境:
source ./devel/setup.bash``
使用ROS launch文件加载LIvox ros driver
roslaunch livox_ros_driver livox_hub_rviz.launch``
览沃驱动程序中所有的 launch 文件都位于 “ws_livox/src/livox_ros_driver/launch” 路径下,不同的 launch 文件拥有不同的配置参数值,可根据不同的使用场景,启动不同的launch文件(详细launch配置文件描述可见 Livox ROS Driver_github 4.1 launch配置文件描述部分)
这里选用的livox_hub_rviz.launch将自动连接Livox Hub设备、向外发布pointcloud2格式的点云数据并自动加载rviz显示实时点云数据,如下图所示:
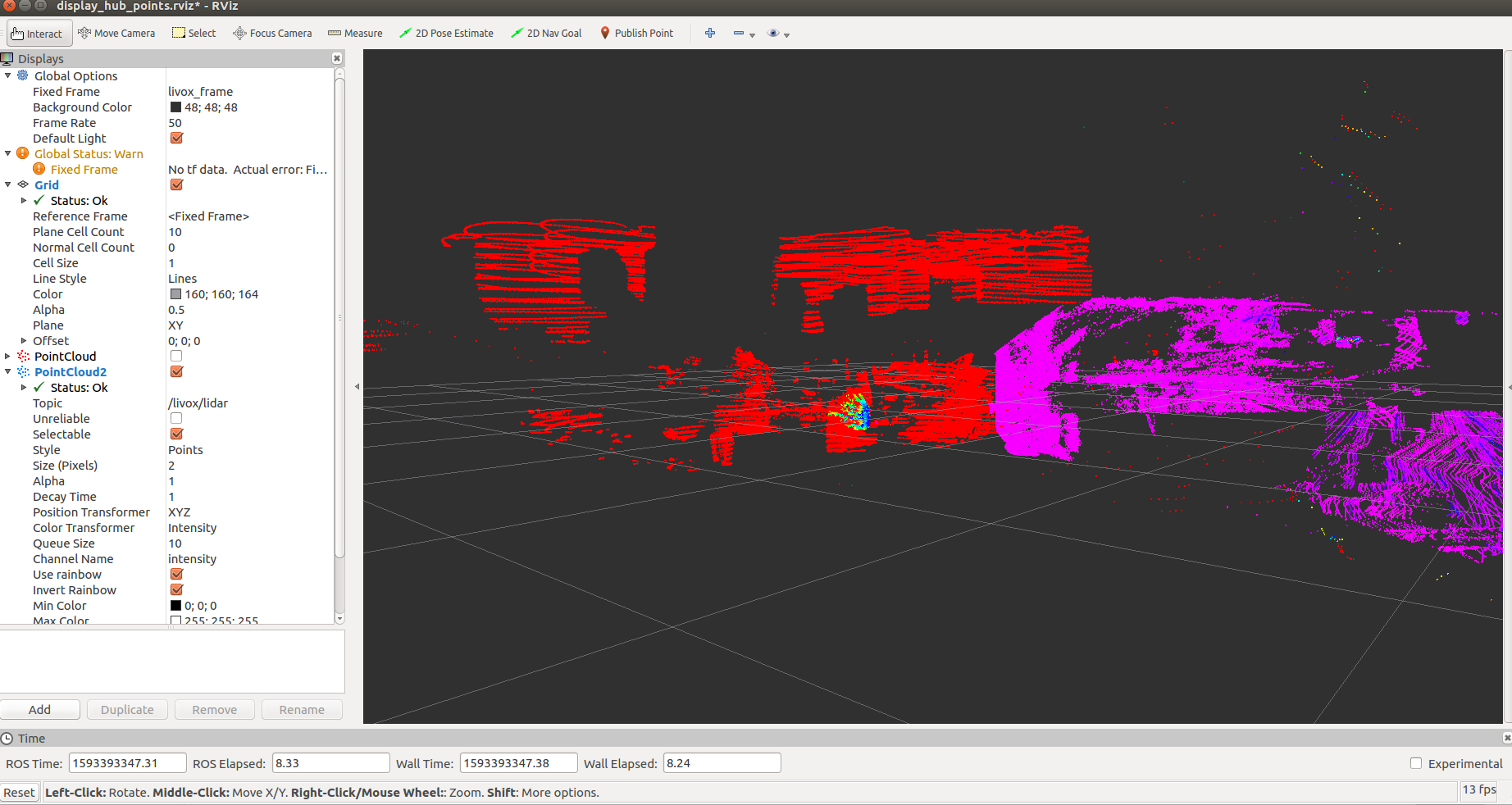
红色部分点云为Livox Horizon扫描到的图像,紫色部分为Livox Mid-40扫描到的图像
livox hub当前已停产,多雷达数据采集可通过ros driver实现,启动livox lidar launch文件,默认配置可连接网段内全部雷达,如果只需要连接其中一两个,具体参考ros驱动的config配置。
2.2.3. 使用Livox Viewer采集数据
连接成功后,在Livox Viewer文件夹内打开终端,运行下列命令打开Livox Viewer程序:
./livox_viewer.sh
点击  打开设备管理器,选择Livox Hub,第一次连接时可能会显示Livox
Hub的IP地址与PC的IP地址不匹配。若已经按照上面步骤将Livox
Hub和PC进行了静态IP的配置,可点击工具栏Network Adapter—refresh
Adapter刷新配置。
打开设备管理器,选择Livox Hub,第一次连接时可能会显示Livox
Hub的IP地址与PC的IP地址不匹配。若已经按照上面步骤将Livox
Hub和PC进行了静态IP的配置,可点击工具栏Network Adapter—refresh
Adapter刷新配置。
打开Hub按钮并点击播放,即可显示多雷达实时扫描数据,如下图所示:
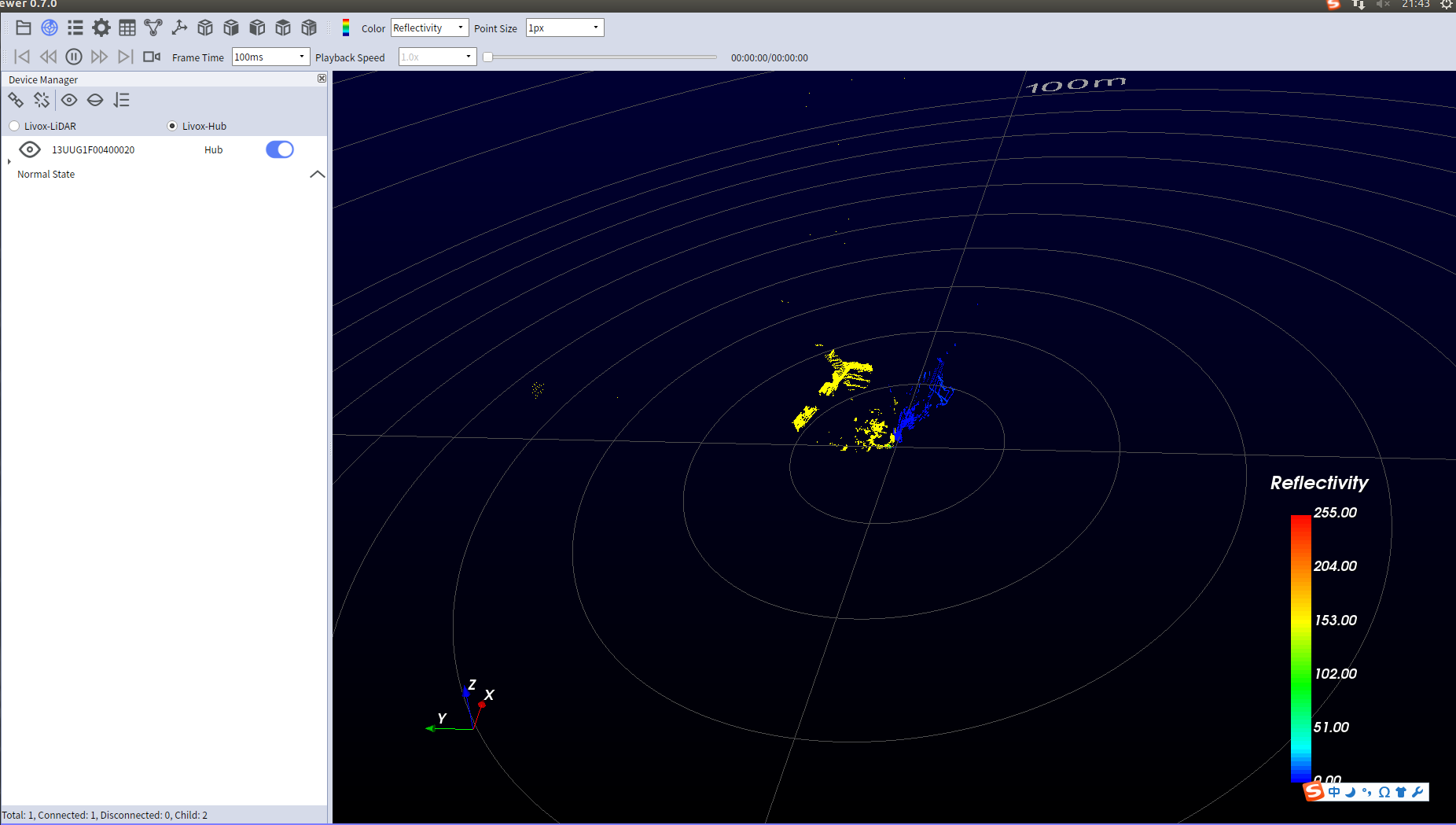
黄色部分点云为Livox Horizon扫描的数据,蓝色部分点云为Livox Mid-40扫描到的数据。
与单雷达数据录制类似,可点击工具栏上的录制按钮进行lvx格式文件的录制,暂停播放或再次点击此按钮结束录制。