2.3. 数据格式及其转换
2.3.1. Livox LiDAR数据格式介绍
Livox LiDAR支持多种方式连接和存储点云数据,其常用格式如下:
bag文件:bag文件是ROS系统常用的点云数据存储格式,Livox LiDAR使用PointCloud2格式和自定义的CustomMsg格式两种。该文件记录了LiDAR扫描过程中每帧点云数据和其他传感器数据。使用ROS连接Livox LiDAR可扫描并存储此格式的数据。
lvx文件:lvx文件是使用Livox Viewer连接Livox LiDAR后存储的点云数据,可在Livox Viewer中查看和编辑。
csv文件:逗号分隔值文件,使用Livox Viewer连接Livox LiDAR后可将lvx点云数据保存为csv格式。
las文件:可用以保存Lidar点数据记录,使用Livox Viewer连接Livox LiDAR后可将点云数据保存为las格式。
pcd文件:可记录某一帧的点云数据。Livox LiDAR记录的数据无法直接保存为pcd格式,需进行转化。
2.3.2. 数据格式转化
2.3.2.1. lvx文件转rosbag文件并播放
软件依赖:Ubuntu 16.04、ROS、livox_ros_driver (此部分驱动的下载和安装详细过程见 驱动)
livox_ros_driver支持将lvx pointcloud数据文件转换为rosbag文件。
在../ws_livox下打开终端,编译:
$ catkin_make
使用如下命令更新当前ROS包环境:
$ source ./devel/setup.bash
再使用以下命令:
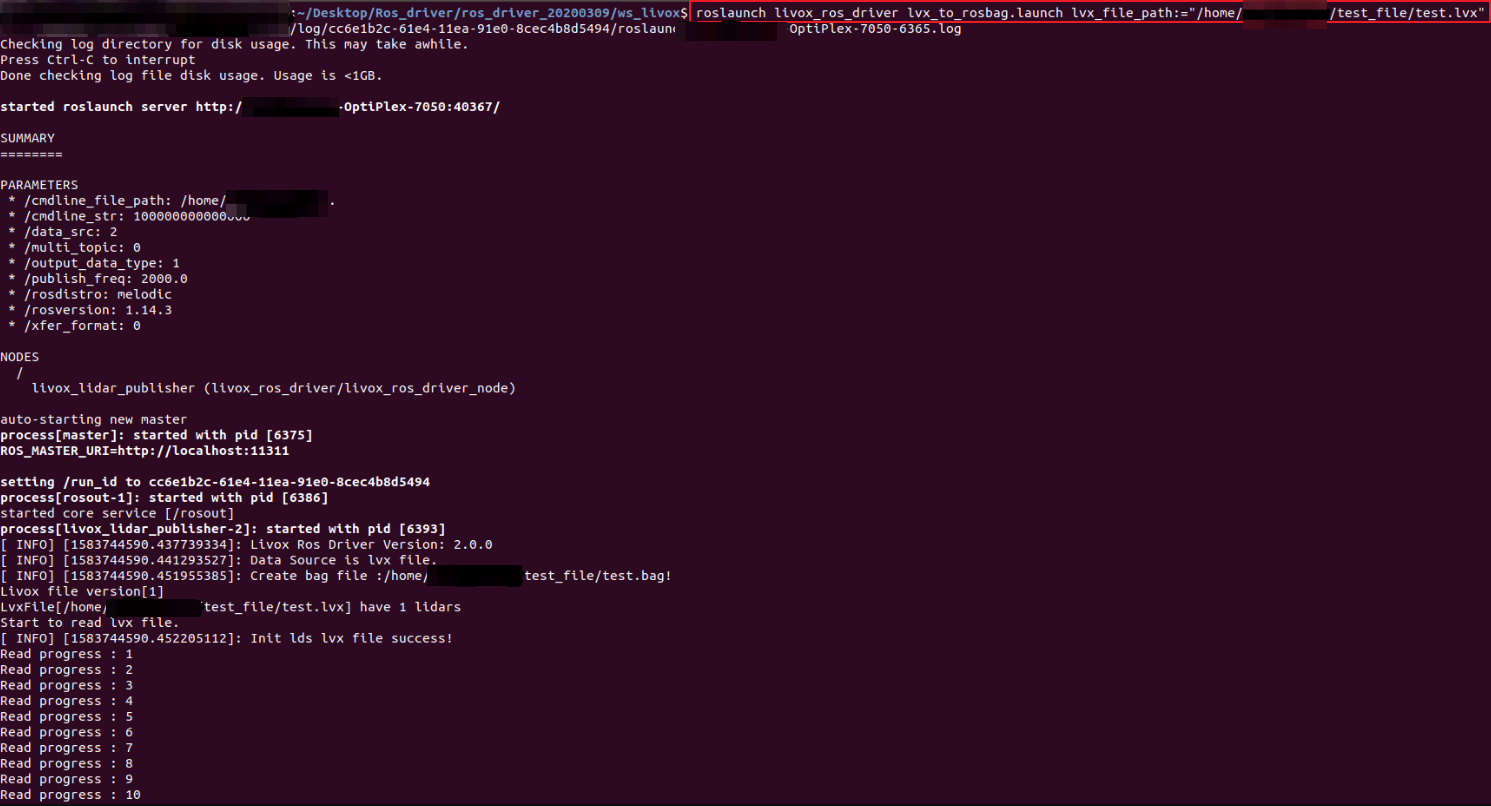
$ roslaunch livox_ros_driver lvx_to_rosbag.launch lvx_file_path:=""
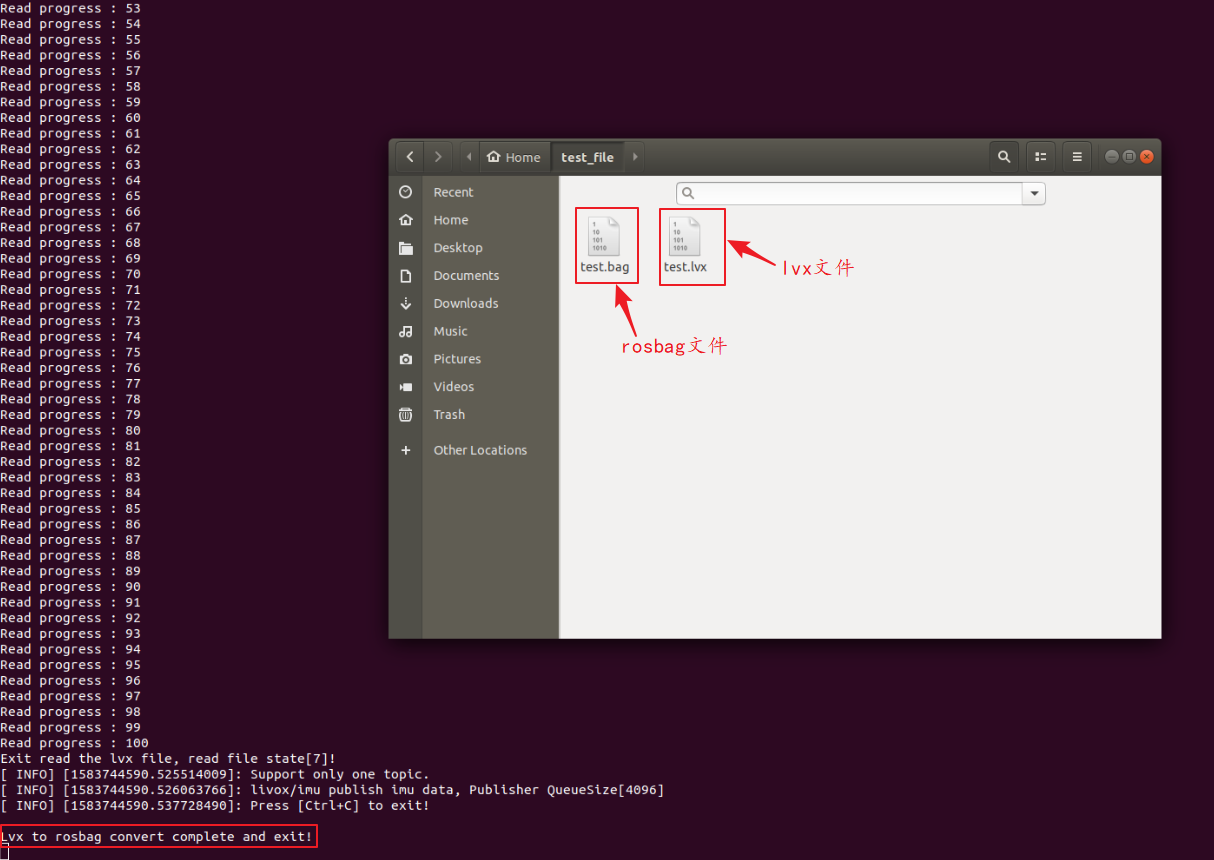
在上述命令中双引号内填写本地lvx数据文件路径即可成功运行,转换成功后将在上述路径下生成同名的rosbag格式文件,如下图所示:
得到转化成功后的test.bag文件后,可使用rviz可视化工具播放,步骤如下:
启动ROS:
$ roscore
运行rviz:
$ rosrun rviz rviz
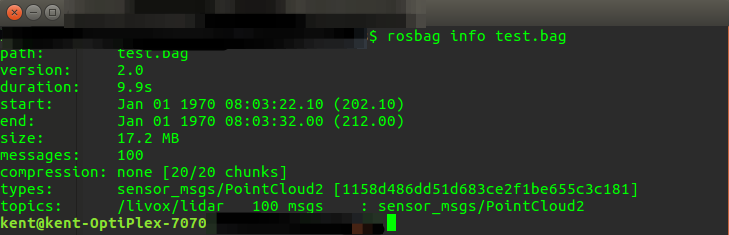
成功打开rviz后,需添加PointCloud2并选择相应的topic,可使用rosbag info <filename.bag>命令查看相应bag文件对应的topic,如下所示:
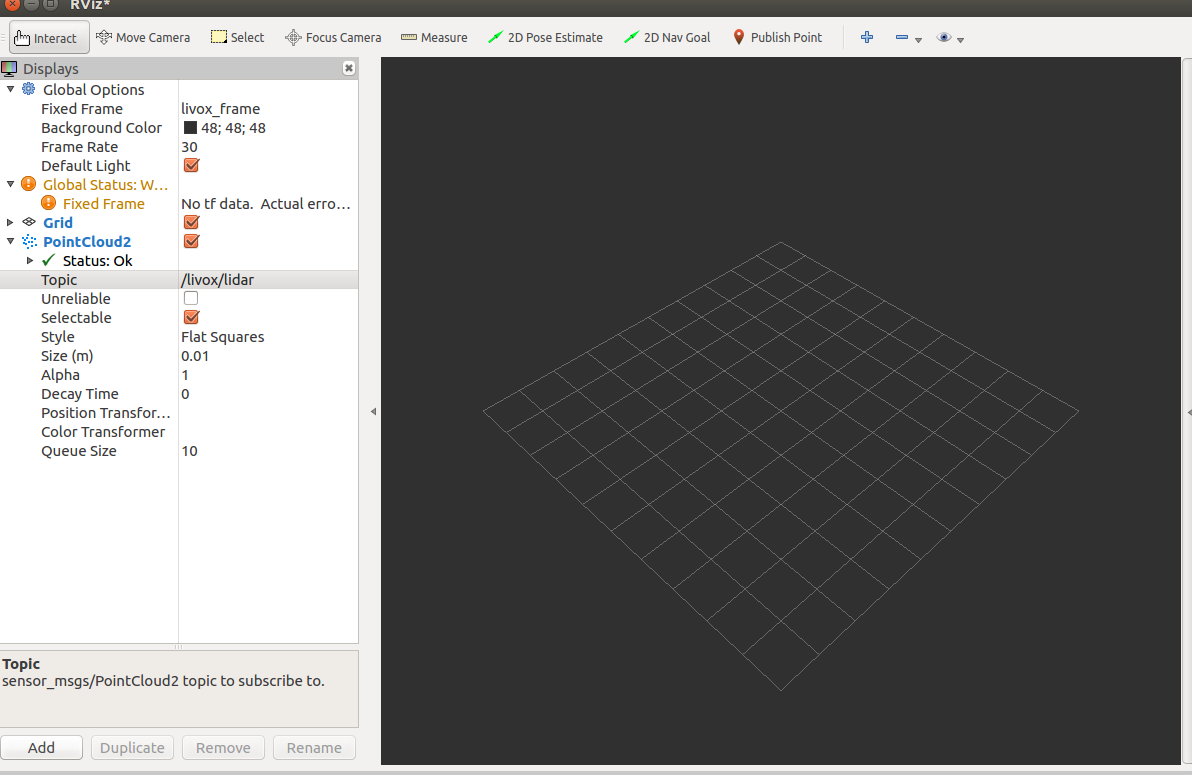
在rviz中添加相应topic:
然后运行rosbag,即可播放:
$ rosbag play <test.bag>
2.3.2.2. lvx文件转.las或.csv文件
软件依赖:Livox Viewer(win or ubuntu)
Livox Viewer提供了一个将lvx 文件整体转为一个las 或者csv 文件的转换工具,方便用户处理数据使用。菜单栏中选择 Tools->File Converter 即可打开此工具。
2.3.2.3. rosbag文件转pcd文件
PointCloud2格式的rosbag文件
参考:http://wiki.ros.org/pcl_ros
软件依赖:Ubuntu 16.04、ROS、PCL
运行ros:
$ roscore
在.bag文件存储路径下打开终端并运行命令:
$ rosrun pcl_ros bag_to_pcd <input_file.bag> <topic> <output_directory>
其中<input_file.bag>为需转换的bag文件名称,<topic>为该bag文件的topic信息,<output_directory>为转化完成后的pcd文件存放地址。
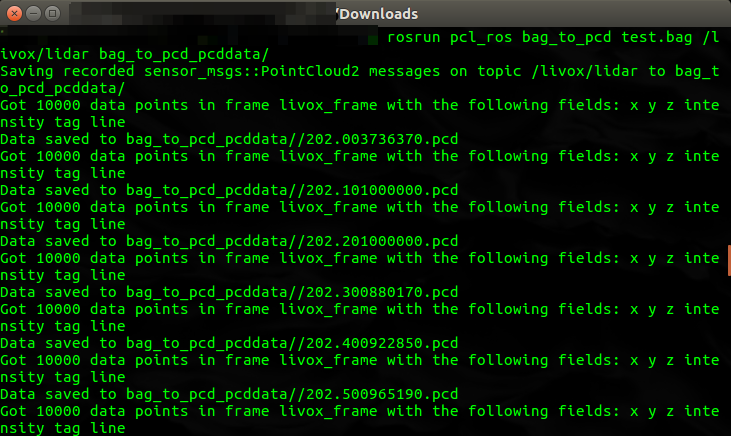
在对应文件夹下,可找到由rosbag文件转化而来的每一帧pcd文件,其文件名为当前帧的时间戳:
转换完成后,可使用pcl_viewer查看pcd文件。命令如下:
$ pcl_viewer <filename.pcd>