1.3.3. 时间同步说明
不同产品支持的同步方式不同,每个产品支持的同步方式详细见各产品页描述.
1.3.3.1. 各种时间同步方式的应用场景
(推荐)PTP/gPTP:
在没有GPS和PPS硬件信号的情况下,PTP v2及gPTP可用于Livox LiDAR和其他设备之间的时间同步。这种方法所需要的外部硬件支持最少,只需要在整个网络中有一个master时钟设备即可。
GPS:
在其它传感器均直接通过GPS信号同步的情况下,直接硬件接入PPS信号以及GPS信号即可完成同步,无需另外部署软件;
1.3.3.2. PTP时间同步
1.3.3.2.1. PTP时间同步原理
同步过程使用IEEE 1588v2.0 PTP的Delay request-response机制(two steps),Livox设备作为slave端,和master时钟设备进行ptp时间同步。
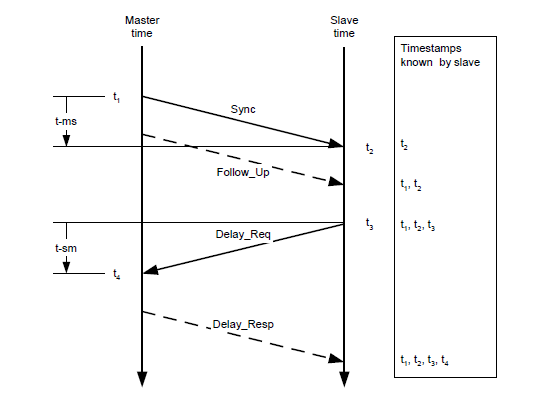
master和slave时钟通过Sync、Follow_Up、Delay_Req、Delay_Resp这几个数据包的交互,得到t1、t2、t3、t4时间,通过如下计算得到传输路径延迟和两时钟的偏移:
传输路径延时:
时间偏移:
1.3.3.2.2. PTP时间同步方法
当Livox LiDAR连接到有ptp master时钟的网络中时,设备会自动同步自己的时间到主时钟。
第一步:检查网络中的master时钟是否正常:
PC上配置主时钟的方法可参考附录 附录:如何配置PTP主时钟
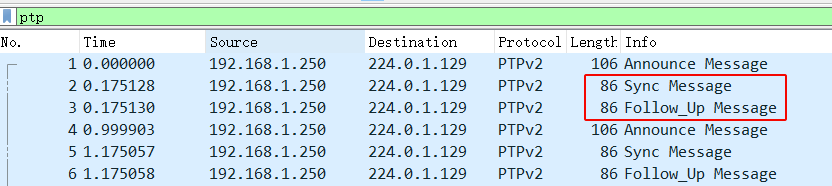
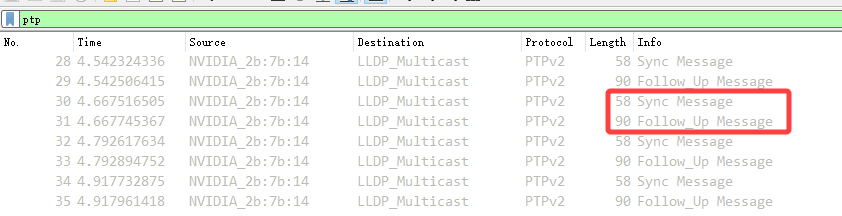
如果网络中有Sync、Follow_Up这两个数据,则说明存在PTP master时钟源,且正常工作:
第二步:连接Livox设备
通过网线正常连接Livox LiDAR即可,无需额外接线。
第三步:如何查看设备在使用PTP同步
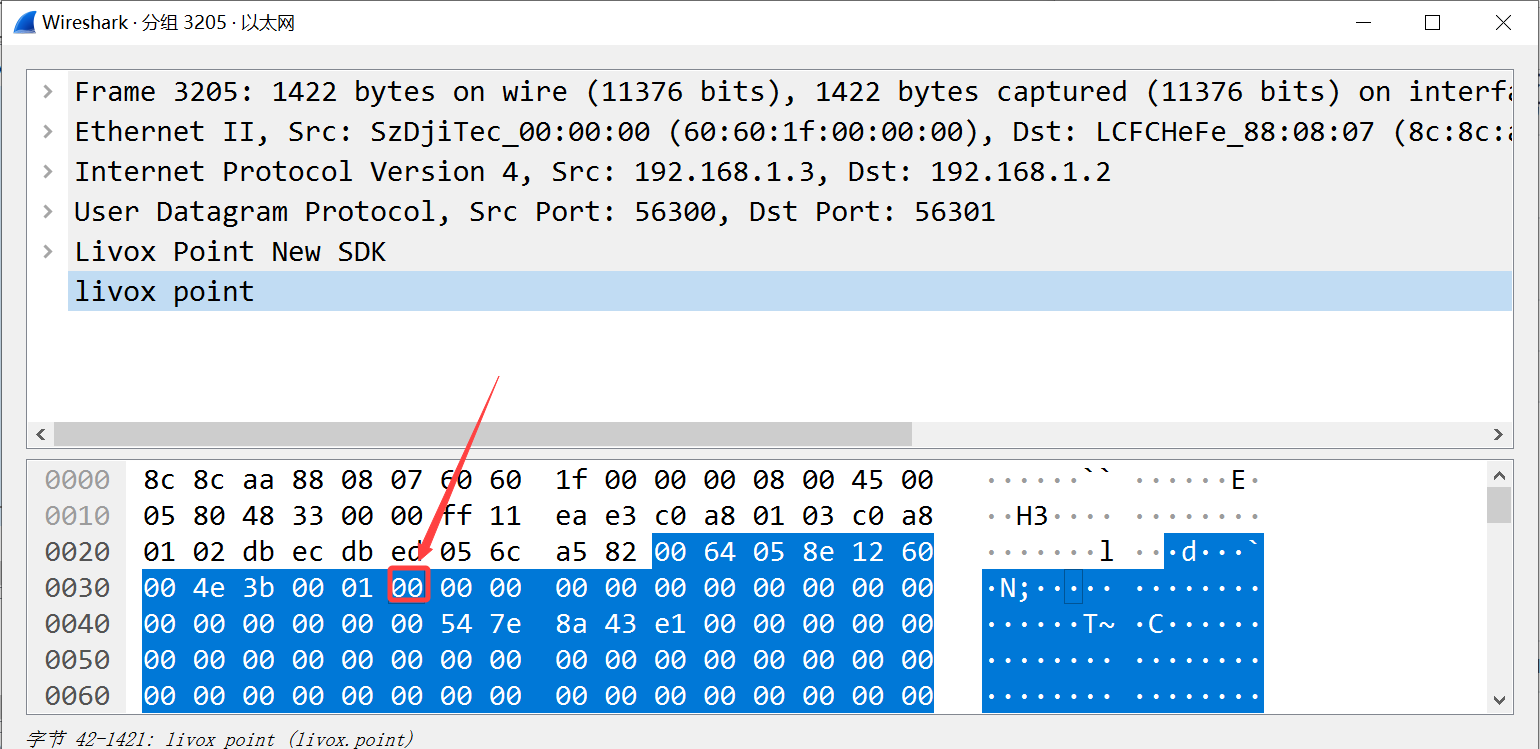
1、通过查看点云数据包头中的timestamp_type数据(详见产品通信协议章节)
如果timestamp_type为1,则说明设备正在进行PTP时间同步:
timestamp_type |
data_type |
时间类型 |
|---|---|---|
1 |
uint64_t |
纳秒(ns) |
2、或者在Livox Viewer上位机中,查看Settings选项,中的Sync Type
备注
PTP同步优先级最高,当PTP或GPS同时可用时,会优先使用PTP网络同步;
不支持具有多个主时钟的网络环境;
1.3.3.3. gPTP时间同步
1.3.3.3.1. gPTP时间同步原理
AUTOSAR的《Specification of Time Synchronization over Ethernet》标准中,对IEEE 802.1AS在车载领域的应用做了相应的特殊要求,形成了AUTOSAR Time Sync over Ethernet标准。
如:
取消网络中的Announce报文;
不支持BMCA算法;
master端不发送delay_req报文;
…
等要求。
Livox雷达时间同步协议和功能也遵循上述标准中的要求,同步过程遵循IEEE 802.1AS标准,其中域控制器作为master,Livox设备作为slave。
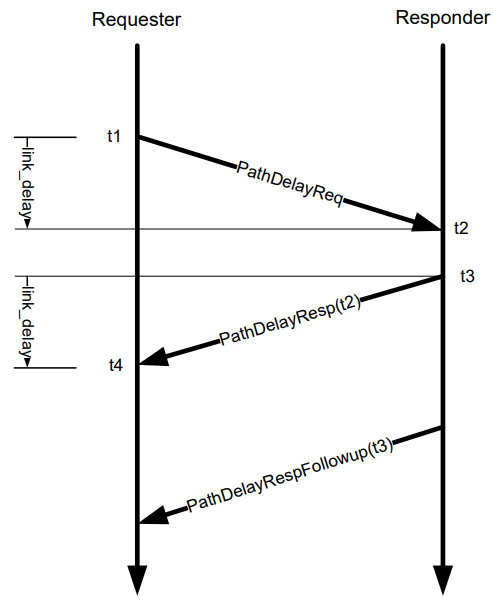
通过上述方式,计算出传输延迟:link_delay = [(t4 - t1) – (t3 - t2)] / 2
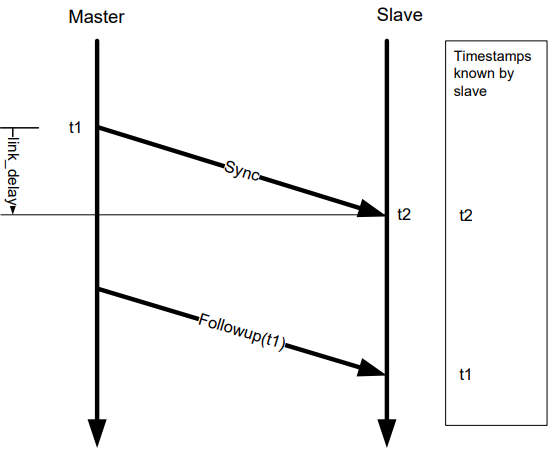
由Sync、Followup计算时间偏移:Offset = (t2’ - t1’) - link_delay
1.3.3.3.2. gPTP时间同步方法
第一步:检查网络中的master时钟是否正常:
PC上配置主时钟的方法可参考附录 附录:如何配置PTP主时钟 ;
如果网络中有Sync、Follow_Up这两个数据,则说明存在gPTP
master时钟源,且正常工作:
第二步:连接Livox设备
通过网线正常连接Livox LiDAR即可,无需额外接线。
第三步:如何查看设备在使用gPTP时间同步
同PTP, 设备状态中不区分PTP同步或者gPTP时间同步。
1.3.3.3.3. 附录:如何配置PTP主时钟
下载:
经过测试,推荐使用 linuxptp v3.1.1
或者通过git clone(不推荐)
git clone http://git.code.sf.net/p/linuxptp/code linuxptp
编译和安装:
cd linuxptp
make
sudo make install
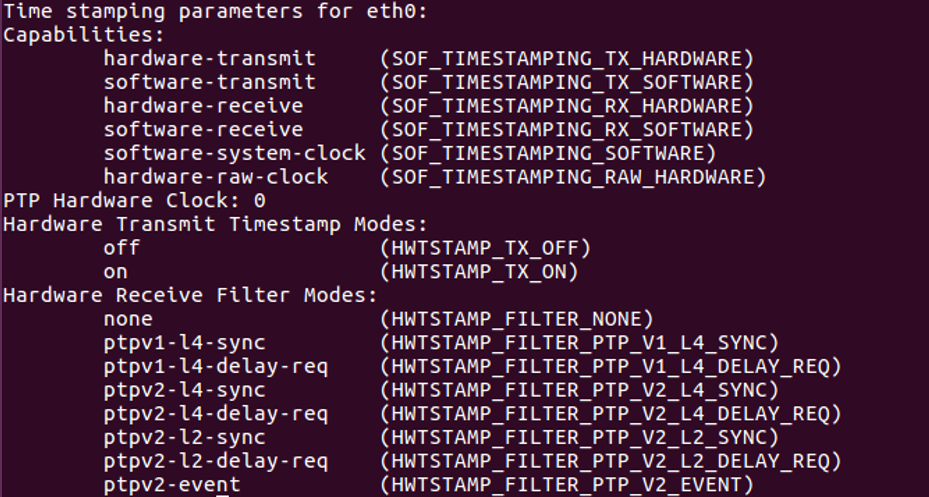
如果要让ptp4l正常工作,需要系统的Linux kernel version 3.0或者更新版本。通过下面的指令来检查网卡是否支持软件/硬件时间戳功能(如:查询网卡 ‘eth0’ 的状态)。
ethtool -T eth0
网卡capabilities选项包括以下参数, 表明网卡支持软件时间戳:
SOF_TIMESTAMPING_SOFTWARE
SOF_TIMESTAMPING_TX_SOFTWARE
SOF_TIMESTAMPING_RX_SOFTWARE
网卡capabilities选项包括以下参数, 表明网卡支持硬件时间戳:
SOF_TIMESTAMPING_RAW_HARDWARE
SOF_TIMESTAMPING_TX_HARDWARE
SOF_TIMESTAMPING_RX_HARDWARE
下图的例子中,表明eth0网卡支持硬件时间戳。
下图的例子中wlan0网卡不支持硬件和软件时间戳,linuxptp/ptp4l不能正常工作。

运行如下指令,采用PTP模式启动ptp4l master时钟功能:
sudo ptp4l -i eth0 -l 6 -m
运行如下指令,采用gPTP模式软件时间戳启动ptp4l master时钟功能:
sudo ptp4l -i eth0 -S -ml 6 -f automotive-master.cfg
运行如下指令,采用gPTP模式硬件时间戳启动ptp4l master时钟功能:
sudo ptp4l -i eth0 -H -ml 6 -f automotive-master.cfg
如果网络中出现 Sync Message
数据,说明ptp4l程序的master时钟功能正常运行:
可以使用如下命令让系统时间和PTP硬件时钟同步:
如果需要更多相关的信息, 请参考 phc2sys链接
sudo phc2sys -c eth0 -s CLOCK_REALTIME -O 0
完成以上步骤,即可通过ptp4l实现雷达时间和PC本地系统时间的同步。
1.3.3.4. GPS时间同步
1.3.3.4.1. GPS时间同步原理
GPS时钟源的PPS端口每秒发送一次硬件脉冲(PPS信号),随后数据端口发送一次对应这个脉冲上升沿的时间信息(GPRMC格式)。
Livox设备接收到PPS信号上升沿,并由GPRMC数据解析出正确的时间信息后,会设置点云时间为GPS时间,并保持此时间基准持续累加,来实现和GPS设备的时间同步。
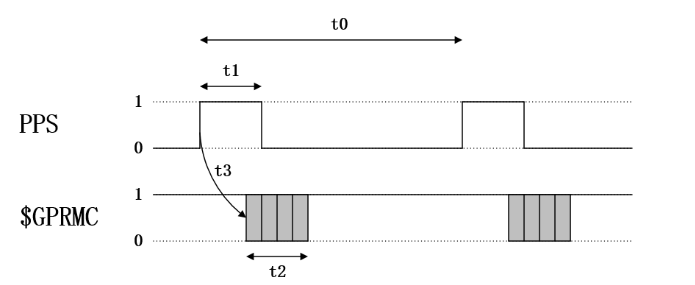
PPS信号和GPRMC信号的时序要求:
时间 |
描述 |
有效范围 |
推荐值 |
t0 |
相邻两次秒脉冲上升沿的间隔 |
900 ms ~ 1100ms |
1000 ms |
t1 |
秒脉冲的高电平时间 |
> 1 us |
10 ms ~ 200 ms |
t2 |
GPRMC的传输时间(波特率:9600bps) |
≈ 70 ms |
70 ms |
t3 |
GPRMC数据开始发送相对于脉冲上升沿的延迟 |
0 ms ~ 900 ms |
0 ms ~ 430 ms |
备注
PPS脉冲的斜率建议大于1V/us
1.3.3.4.2. GPS时间同步方法
为了兼容其他厂商的LiDAR硬件,Livox设备也支持GPS时间同步。
以下以Mid-360为例,介绍两种采用GPS同步的方式:
(推荐)通过串口同步:Lidar硬件接入PPS脉冲信号,Lidar硬件接入GPRMC串口信号;
通过以太网同步:硬件接入PPS脉冲信号,通过UDP包发送GPRMC信号到Lidar;
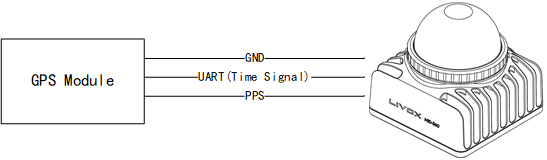
1.3.3.4.2.1. 通过串口同步
硬件连接
如果GPS模块的UART输出信号和PPS信号是TTL(3.3v)电平,直接将两根信号线接入Mid360外接的对应管脚(管脚8 “秒脉冲”与管脚10 “GPS输入”引脚)即可,Mid360对应的管脚线序详见《Livox Mid-360用户手册》;
否则,需要将Uart信号与PPS信号转换为TTL(3.3v)电平,才能接到Mid-360对应管脚。
备注
采用串口方式,不需要进行SDK软件的配置;
特别需要注意硬件接入电平,否则会造成设备损坏;
GPS串口需配置为:波特率9600、数据位8bit、无校验;
GPS串口输出的内容中需要包含GPRMC或者GNRMC信息;
需要注意硬件接线的信号质量,会严重影响同步的稳定性以及同步精度。
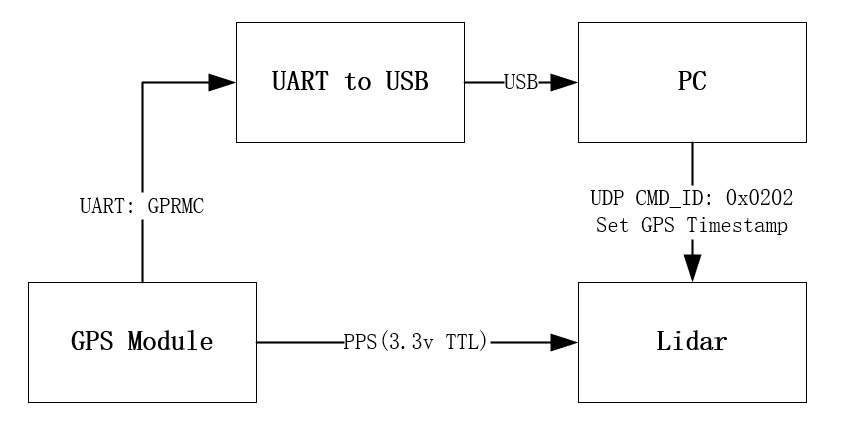
1.3.3.4.2.2. (不推荐)通过以太网同步
如果GPS模块输出的GPRMC信号接入上位机(PC或工控机),上位机解析时间信息后,可以根据控制命令协议发送UDP包来给设备设置GPS时间戳;
如何查看设备在使用GPS时间同步
1、通过查看点云数据包头中的timestamp_type数据(详见产品通信协议章节)
如果timestamp_type为2,则说明设备正在进行GPS时间同步:
timestamp_type |
data_type |
时间类型 |
|---|---|---|
2 |
uint64_t |
纳秒(ns) |
2、或者在Livox Viewer上位机中,查看Settings选项的Sync Type;
备注
通常情况下,GPS模块接收到GPS信号,才能正常输出PPS信号和时间信号。在使用时,需要确保GPS信号是稳定的;目前时间信号只支持GPRMC/GNRMC这两种格式;